F1TENTH Autonomous Vehicle
project
AI
optimization
controls
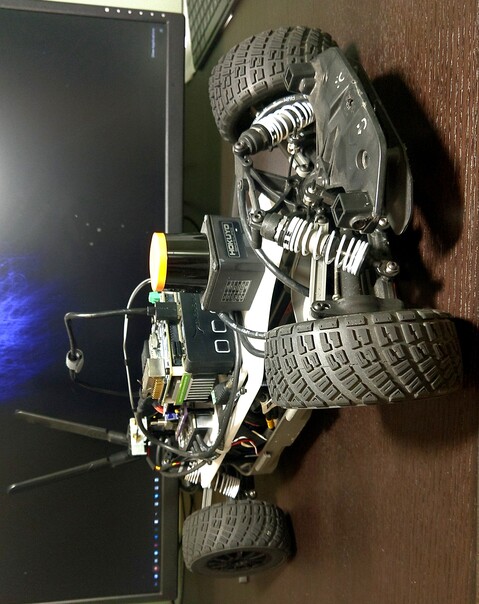
I built this during the pandemic to learn about model predictive control and autonomous systems design. The F1TENTH platform is build on a 1/10 scale rc car that can navigate a track autonomously.
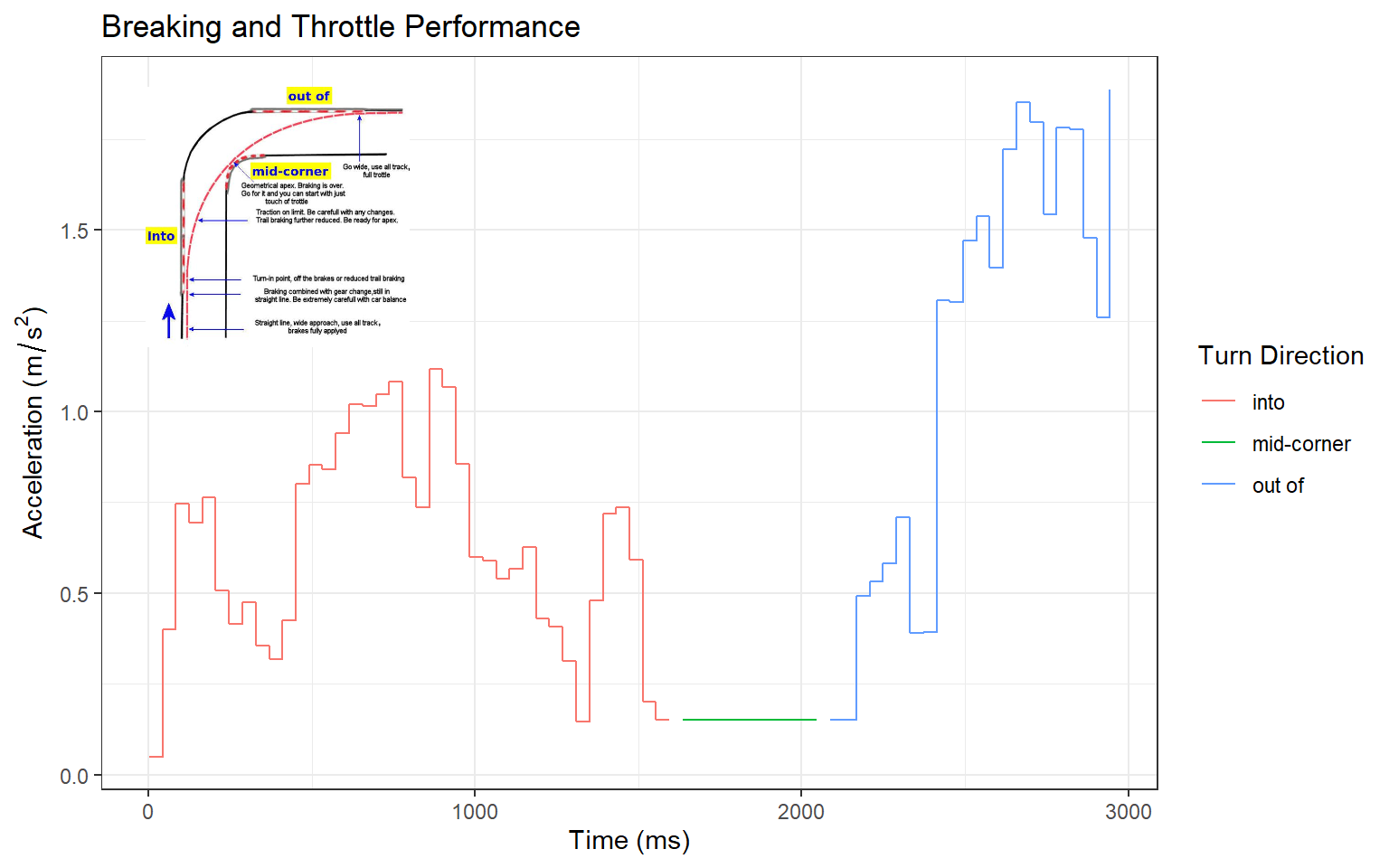
My main focus was to improve the performance by modifying the hardware configurations. For example, using DOE with sway bar type and shock stiffness as factors, we could optimize lap times with specific throttle characteristics.

Some DOE results exploiting the above throttle characteristics:
# A tibble: 1,440 × 5
sway_bar_type shock_stiffness condition time trial
<chr> <chr> <chr> <dbl> <dbl>
1 Stiff Low Travel High mid-corner 2404 1
2 Stiff High Travel Low into 2218 1
3 Stiff High Travel High into 2179 1
4 Stiff High Travel High out of 2142 1
5 Stiff High Travel High into 2128 2
6 Stiff Low Travel High out of 2063 1
7 Stiff Low Travel High out of 1986 2
8 Stiff Low Travel High into 1947 1
9 Stiff High Travel Low mid-corner 1941 1
10 Stiff High Travel High into 1858 3
# ℹ 1,430 more rowsValidation of the optimized parameters:
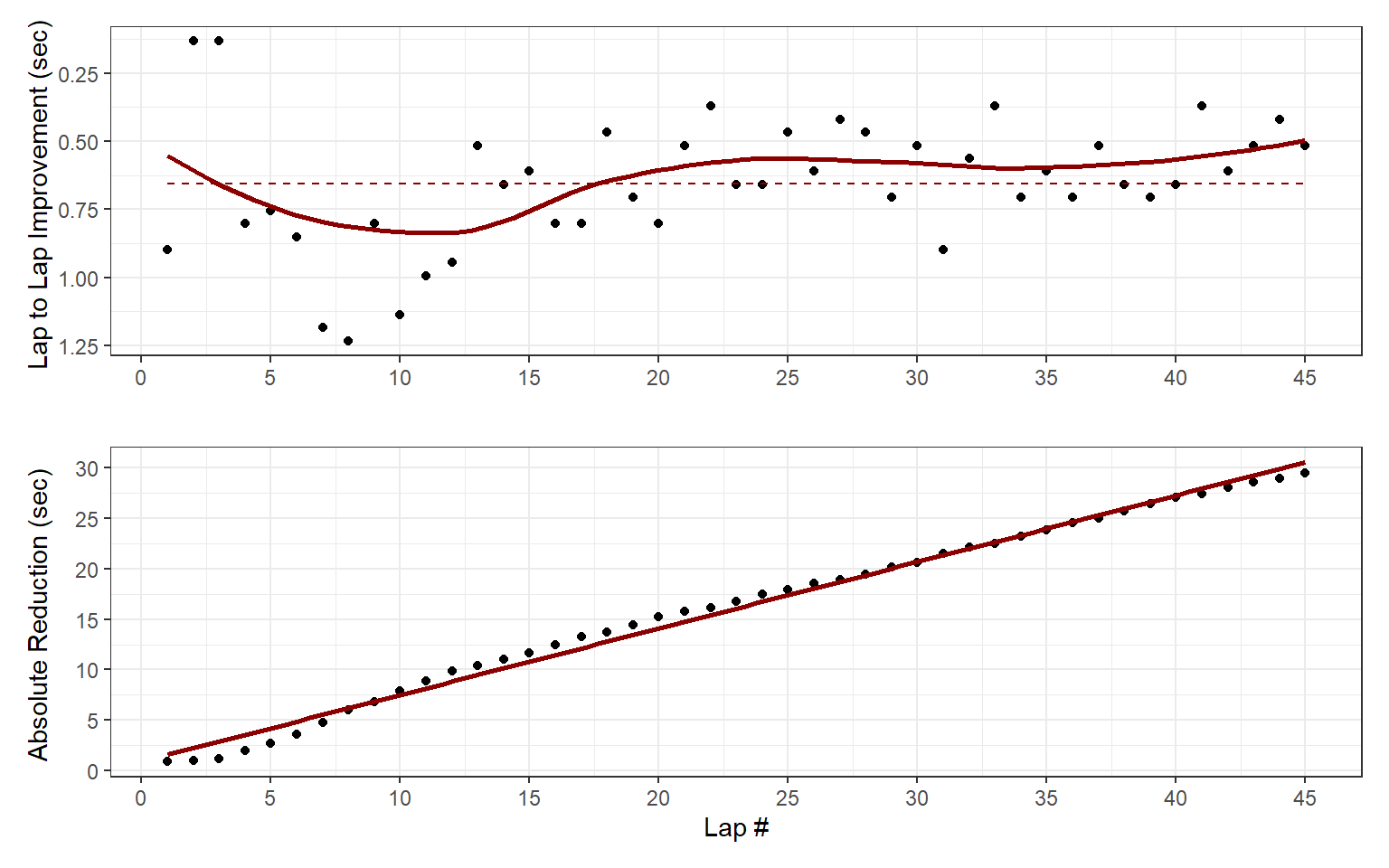
The easiest way to improve lap times is to code up a new algorithm. But with a little investment, you can optimize system performance, too.