Spring Attachment for Precision Drilling
project
nonlinear
dynamical systems
vibrations
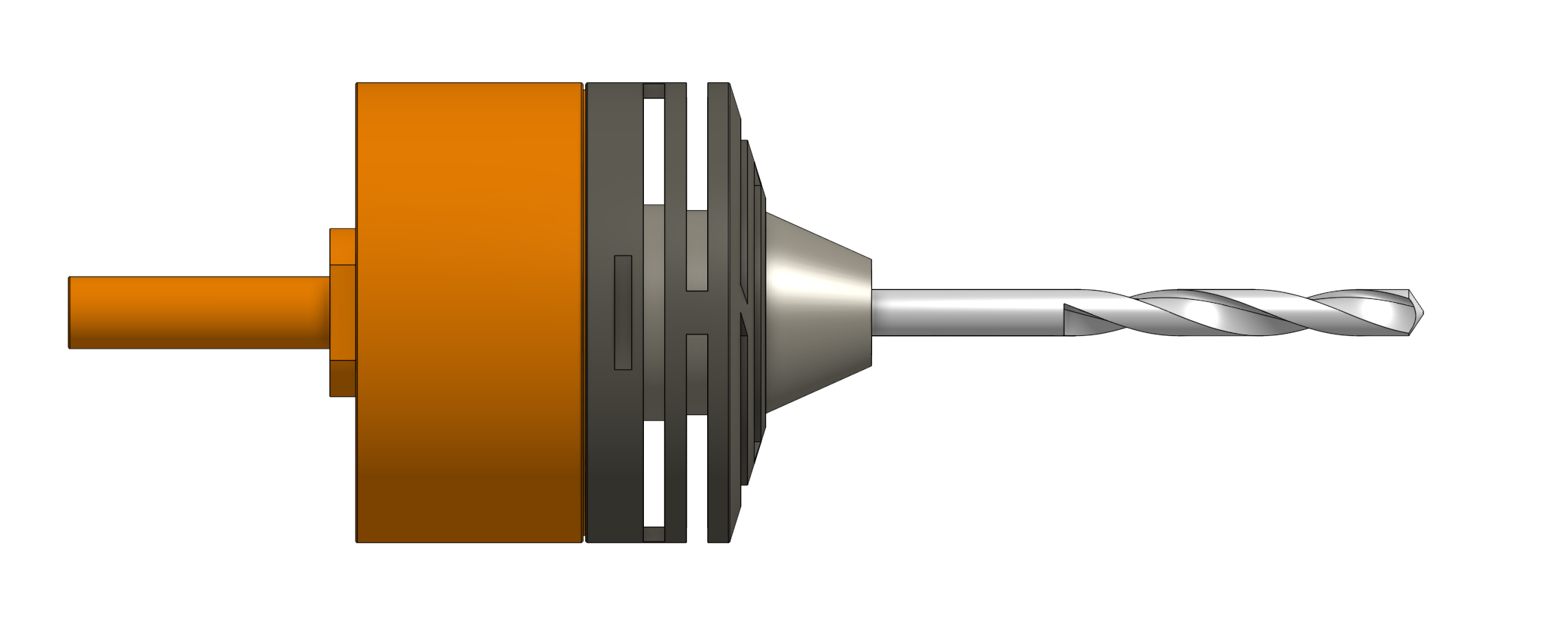
This started as a college project with a high school friend and turned into one of the more technically interesting things I’ve worked on. The goal was to develop a Dremel attachment capable of producing precise hole diameters by controlling bit runout, essentially solving a tolerance stacking problem without requiring a precision collet.
Rather than trying to eliminate lateral disturbances mechanically (which gets expensive fast when everything is spinning), the spring geometry is designed to passively suppress them. Any lateral stress introduced into the system gets damped out by the attachment itself, making tight hole tolerances mostly achievable with an otherwise imprecise setup.
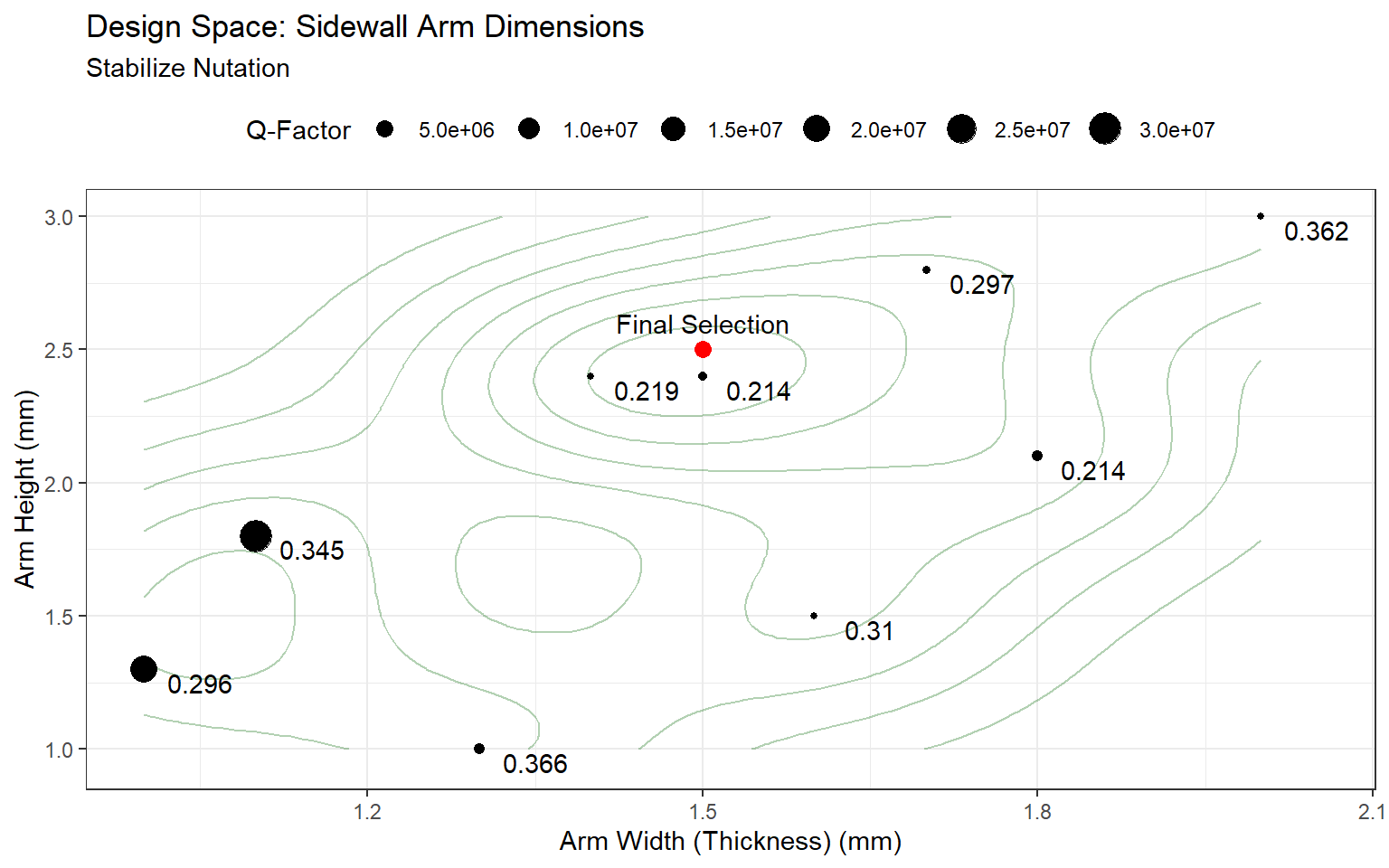
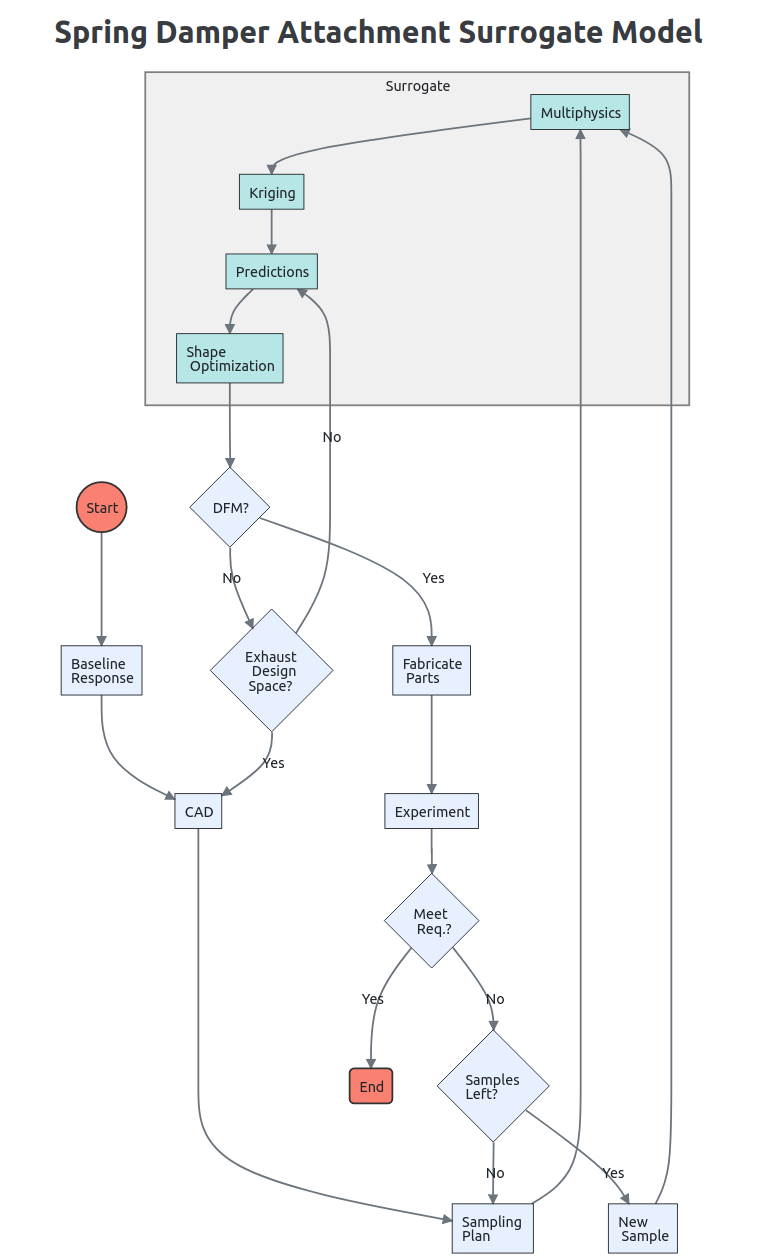
A surrogate model was used to optimize the spring geometry, arm height, width, and sprin Q-factor across the design space before a physical build. The drilling signal is inherently chaotic, which led us into nonlinear dynamics territory. We also dit limit cycle analysis and Lyapunov exponents to characterize system behavior and find stable operating regimes.
Development Areas
- Spring attachment
- Nonlinear control algorithms
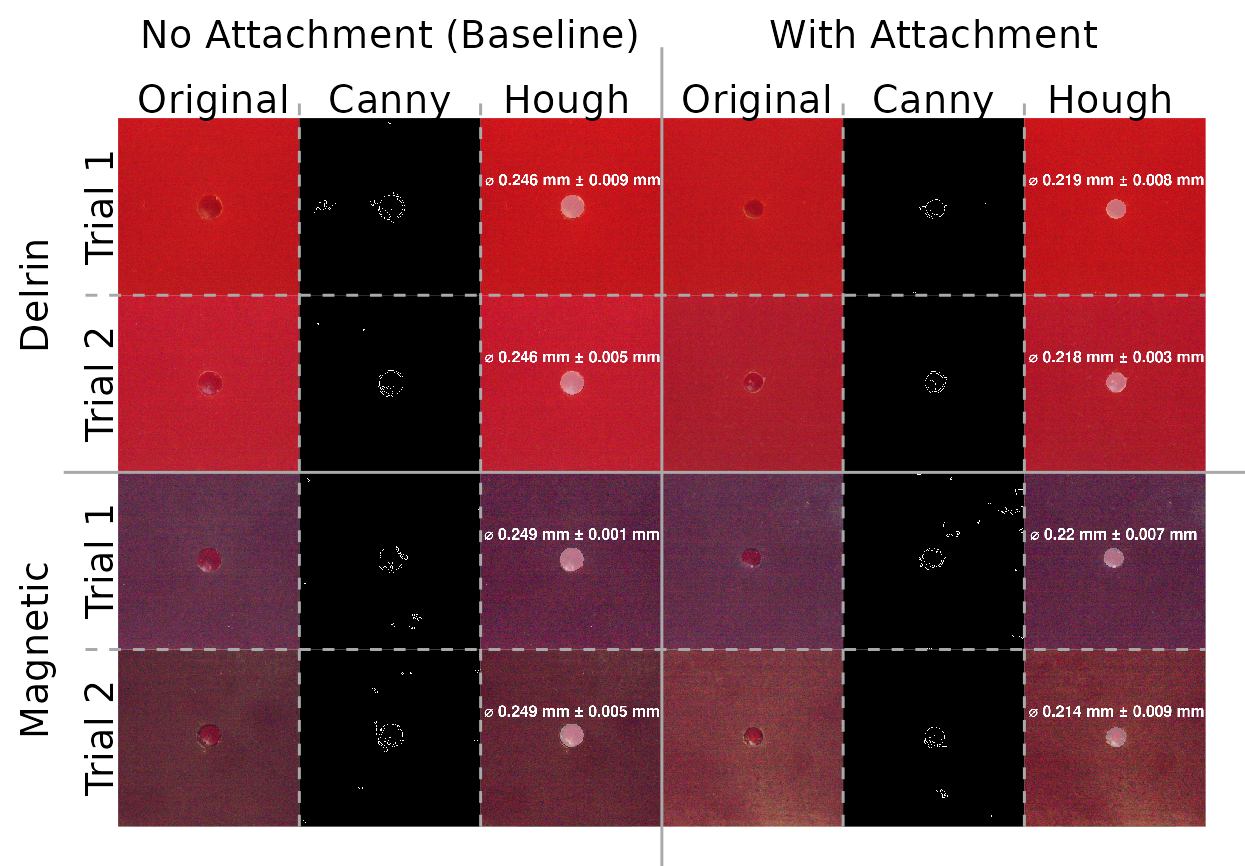
- Camera based measurement system

Optimization and Control Regime
Lyapunov exponents:
| set | lyap_2 | lyap_3 | lyap_4 | lyap_5 | lyap_6 |
|---|---|---|---|---|---|
| 1 | -0.0095 | -0.1604 | -0.257 | -0.3927 | -0.7121 |
Final Results
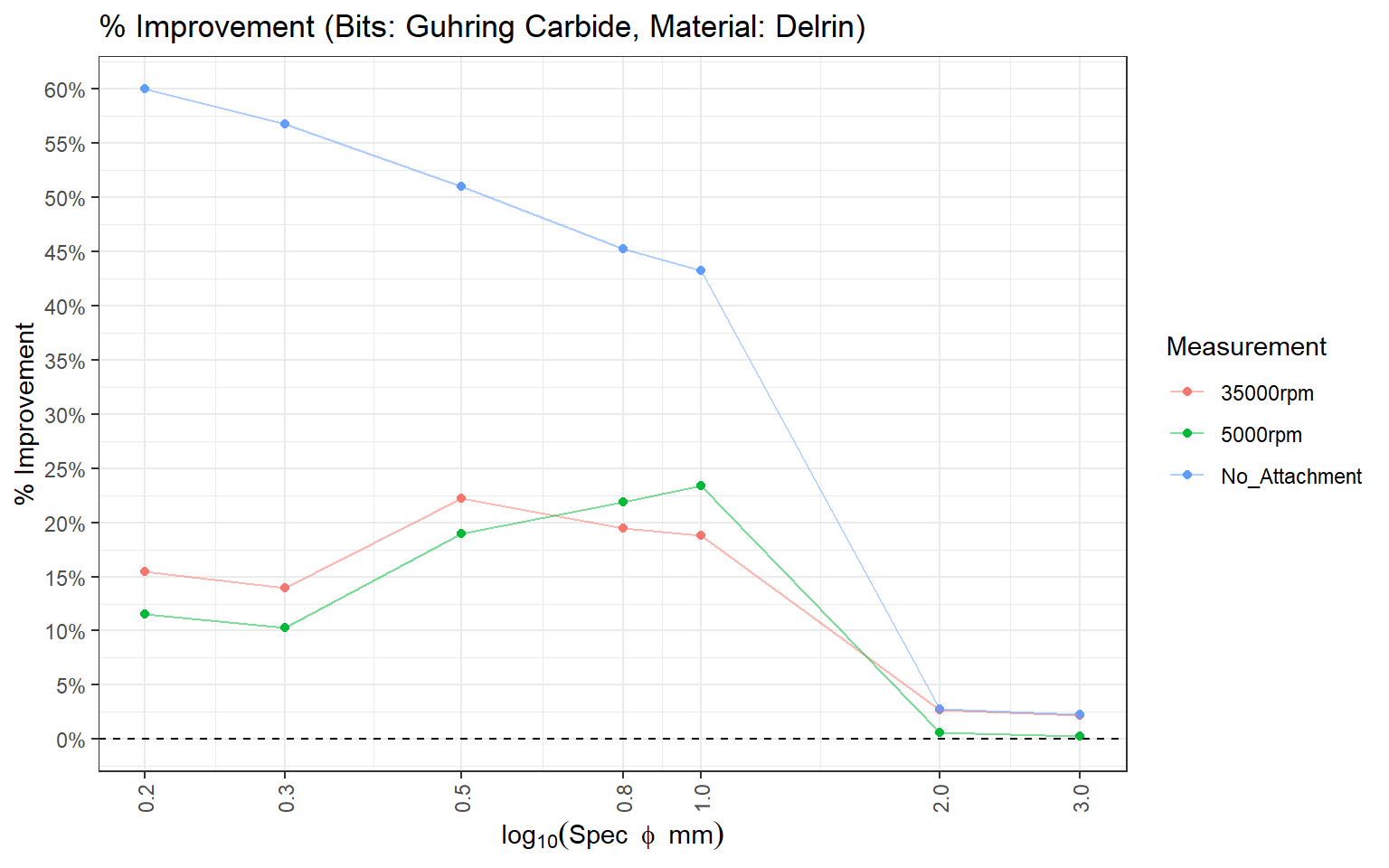
For example, a 0.02mm bit will produce holes at 0.022mm + \(\epsilon\) mm at the upper bound.
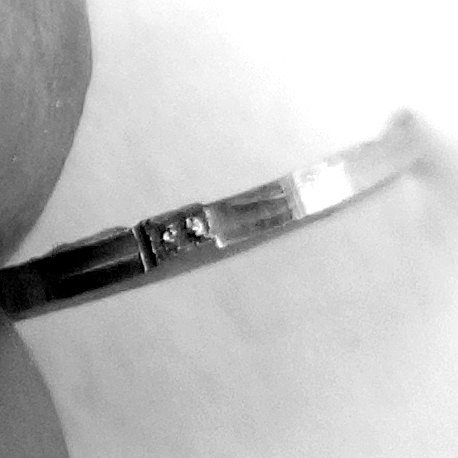
The spring does fail under stress, which is a big safety concern. If the attachment is pushed too hard onto the workpiece, the inner ring “arms” can mangle. You can see the type of force that was responsible for the failure, the left is torsional and the right is bending.